Hlavním úkolem elektromotoru je přeměna elektrické energie na mechanickou energii. Elektromotory se dnes vyrábějí jak na stejnosměrný, tak na střídavý proud. Mezi střídavými motory vedou asynchronní a synchronní motory. Asynchronní motory s nízkým a středním výkonem patří do skupiny nejčastěji používaných elektromotorů. Jsou široce používány jak v průmyslu, tak v domácích spotřebičích.
V průmyslu se nejčastěji používají třífázové asynchronní motory. Používají se např. v energetice – jako pohony pro vlastní potřebu elektráren, ve stavebnictví, v dopravě, ve veřejných službách – jako pohony vodárenských čerpadel apod.
Rozdíl mezi asynchronním motorem a synchronním motorem
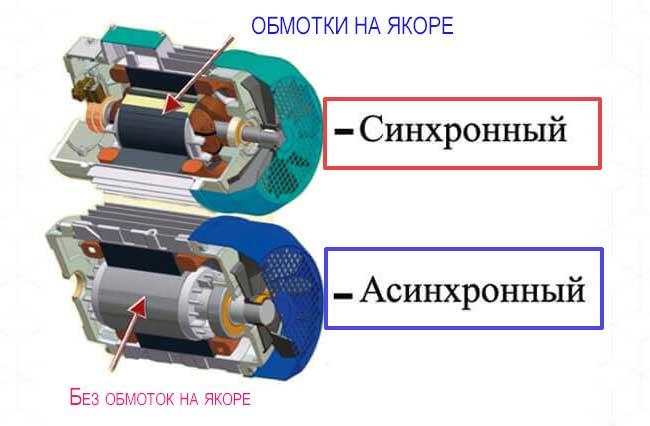
Vzhledově jsou si vzhledově podobné, někdy ani specialista vnějšími znaky nerozezná synchronní elektromotor od asynchronního. Oba elektromotory mají pevný stator, sestávající z vinutí (cívek), které jsou uloženy v drážkách jádra z plechů z elektrooceli, a pohyblivého rotoru. Funkce těchto typů elektromotorů je navíc stejná – vytváření točivého magnetického pole statoru.
Rotor synchronního motoru má nezávisle napájené budicí vinutí. Stator synchronního a asynchronního motoru jsou uspořádány stejně, funkce je v každém případě stejná – vytvoření točivého magnetického pole statoru.
Tyto dva typy motorů mají různé aplikace: synchronní motory mají mnohem větší výkon a užitečné zatížení, ale jsou dražší a složitější. A proto jsou asynchronní motory žádané tam, kde jsou jejich charakteristiky dostatečné, protože jsou levnější a jednodušší na výrobu.
Nevýhody a výhody motorů
Synchronní motory
 |  |  |
Synchronní motory mají poměrně složitou konstrukci kvůli přítomnosti sestavy kartáčů. Kromě toho vyžadují k provozu další stejnosměrný zdroj. Další nevýhodou je nemožnost jejich provozu v podmínkách častých startů a zastavení. To vše je však kompenzováno vysokým výkonem, vysokou účinností, odolností proti poklesům napětí v napájecí síti a stabilními otáčkami hřídele bez ohledu na jeho zatížení.
Synchronní elektrické stroje jsou cenově výhodné při výkonech nad 100 kW a používají se především pro otáčení výkonných ventilátorů, v různých hutních odvětvích, pro pohon čerpadel, která mají nejen značný výkon, ale i dlouhý provozní režim atd.
Indukční motor
 |  |  |
Asynchronní motor je na rozdíl od synchronních strojů citlivější na kolísání napětí a při zvýšení zátěže nedokáže udržet jmenovité otáčky. Ve většině případů jsou nedostatky kompenzovány použitím frekvenčních měničů a jiných startérů. Ale jednoduchost konstrukce, dlouhá životnost, všestrannost použití, schopnost pracovat v režimu častého zapínání a zastavování činí tyto stroje nejrozšířenějšími v průmyslovém a domácím sektoru.
V tomto článku se podíváme na zásadní rozdíly mezi synchronními a asynchronními elektromotory, aby každý, kdo čte tyto řádky, těmto rozdílům jasně porozuměl.
Asynchronní elektromotory jsou dnes rozšířenější, nicméně v některých situacích se synchronní motory ukazují jako vhodnější, efektivnější pro řešení konkrétních průmyslových a výrobních problémů, o tom bude řeč níže.
Nejprve si připomeňme, co je elektromotor. Elektrický motor je elektrický stroj určený k přeměně elektrické energie na mechanickou energii otáčení rotoru a sloužící jako pohon nějakého mechanismu, například k pohonu jeřábu nebo čerpadla.
Ve škole všem bylo řečeno a ukázáno, jak se dva magnety odpuzují jako póly a na rozdíl od pólů se přitahují. Jedná se o permanentní magnety. Existují ale i variabilní magnety. Každý si pamatuje kresbu s vodivým rámem umístěným mezi póly permanentního magnetu ve tvaru podkovy.
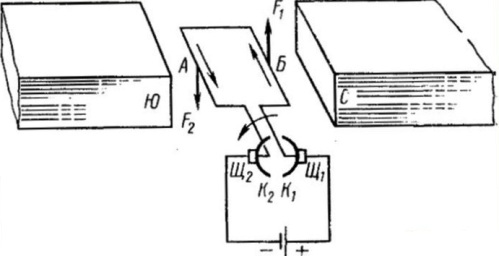
Horizontálně umístěný rám, pokud jím prochází stejnosměrný proud, se začne vlivem dvojice sil (Ampérova síla) otáčet v magnetickém poli permanentního magnetu, dokud není dosaženo rovnováhy ve vertikální poloze.
Pokud pak rámem propustíte stejnosměrný proud v opačném směru, rám se otočí dále. V důsledku tohoto střídavého napájení rámu stejnosměrným proudem, nejprve v jednom směru, pak ve druhém, je dosaženo kontinuálního otáčení rámu. Rám je zde analogem střídavého magnetu.
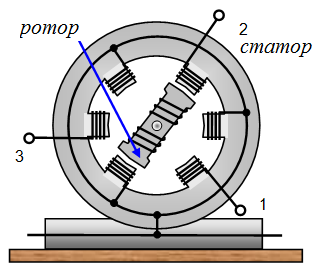
Uvedený příklad s otočným rámem demonstruje v nejjednodušší podobě princip činnosti synchronního elektromotoru. Jakýkoli synchronní elektromotor má na rotoru budicí vinutí, která jsou napájena stejnosměrným proudem, který tvoří magnetické pole rotoru. Stator synchronního elektromotoru obsahuje statorové vinutí pro vytvoření magnetického pole statoru.
Když je do vinutí statoru přiváděn střídavý proud, rotor se bude otáčet frekvencí odpovídající frekvenci proudu ve vinutí statoru. Frekvence otáčení rotoru bude synchronní s frekvencí proudu statorového vinutí, proto se takový elektromotor nazývá synchronní. Magnetické pole rotoru je vytvářeno proudem a není indukováno polem statoru, takže synchronní motor je schopen udržovat synchronní jmenovité otáčky bez ohledu na výkon zátěže, samozřejmě v rozumných mezích.
Asynchronní elektromotor se zase liší od synchronního. Pokud si pamatujete kresbu v rámu a rám je jednoduše zkratován, pak když se magnet otáčí kolem rámu, proud indukovaný v rámu vytvoří magnetické pole rámu a rám se pokusí dohnat s magnetem.
Frekvence otáčení rámu při mechanickém zatížení bude vždy menší než rychlost otáčení magnetu a frekvence proto nebude synchronní. Tento jednoduchý příklad demonstruje princip činnosti indukčního motoru.
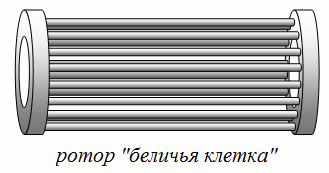
U asynchronního elektromotoru je rotující magnetické pole tvořeno střídavým proudem statorového vinutí umístěného v jeho štěrbinách. Rotor typického indukčního motoru nemá žádné vinutí, ale místo toho obsahuje zkratované tyče (rotor klece veverky), nazývané rotor klece veverky. Existují i asynchronní motory s vinutým rotorem, kde rotor obsahuje vinutí, u kterých lze odpor a proud řídit reostatem.
Jaký je tedy zásadní rozdíl mezi asynchronním elektromotorem a synchronním? Vzhledově vypadají podobně, někdy ani specialista podle vnějších znaků nerozezná synchronní elektromotor od asynchronního. Hlavní rozdíl spočívá v konstrukci rotorů. Rotor asynchronního elektromotoru není napájen proudem a póly na něm jsou indukovány magnetickým polem statoru.
Rotor synchronního motoru má nezávisle napájené budicí vinutí. Stator synchronního a asynchronního motoru jsou uspořádány stejně, funkce je v každém případě stejná – vytvoření točivého magnetického pole statoru.
Otáčky asynchronního motoru při zatížení vždy zaostávají za rotací magnetického pole statoru o velikost skluzu, zatímco otáčky synchronního motoru se frekvenčně rovnají „otáčkám“ magnetického pole statoru, takže pokud otáčky musí být konstantní při různém zatížení, je vhodnější zvolit synchronní motor, např. v Při pohonu gilotinových nůžek si se svým úkolem nejlépe poradí výkonný synchronní motor.

Rozsah použití asynchronních motorů je dnes velmi široký. Jsou to všechny druhy strojů, dopravníků, ventilátorů, čerpadel – všechna zařízení, kde je zatížení relativně stabilní, nebo snížení otáček při zatížení není pro pracovní proces kritické.
Některé kompresory a čerpadla vyžadují konstantní otáčky při jakémkoli zatížení, na taková zařízení jsou instalovány synchronní elektromotory.
Synchronní motory jsou na výrobu dražší než asynchronní, takže pokud máte na výběr a mírné snížení otáček při zátěži není kritické, pořiďte si asynchronní motor.
Synchronní elektromotory jsou široce používány v elektrických pohonech, které nevyžadují regulaci otáček. Ve srovnání s asynchronními motory mají řadu výhod:
- vyšší účinnost;
- schopnost vyrábět motory s nízkými otáčkami, což eliminuje potřebu mezilehlých převodů mezi motorem a pracovním strojem;
- otáčky motoru nezávisí na zatížení jeho hřídele;
- Možnost použití jako zařízení pro kompenzaci jalového výkonu.
Synchronní elektromotory mohou být spotřebiči a generátory jalového výkonu. Povaha a hodnota jalového výkonu synchronního motoru závisí na velikosti proudu v budícím vinutí. Závislost proudu ve vinutí, které dodává napětí do elektrické sítě, na budícím proudu se nazývá charakteristika tvaru U synchronního motoru. Při 100% zatížení hřídele motoru je jeho kosinus fí roven 1. Elektromotor v tomto případě nespotřebovává jalový výkon z elektrické sítě. Proud ve vinutí statoru má minimální hodnotu.
Telegramový kanál pro ty, kteří se chtějí každý den učit nové a zajímavé věci: Škola pro elektrikáře
Pokud se vám tento článek líbil, sdílejte odkaz na něj na sociálních sítích. Velmi to pomůže rozvoji našeho webu!
Nenechte si ujít aktualizace, přihlaste se k odběru našich sociálních sítí:
















